
El proyecto HaptoRender, en marcha desde 2009, pretende dar a los discapacitados visuales la oportunidad de navegar con eficacia a través de un modelado exacto de una ciudad, gracias a una comprensión táctil de las característica físicas de un mapa. Se basa en los datos almacenados en OpenStreetMap y, como aquel, es un proyecto colaborativo para crear mapas libres y editables con los datos geográficos proporcionados por los usuarios.
Con el sistema HaptoRender los mapas saltarían al 3D para mostrar zonas espaciales que puedan ser modeladas por las nuevas impresoras tridimensionales, ofreciendo así a los disminuidos visuales una nueva forma de orientarse por las calles.
Esta suerte de mapas hápticos (táctiles) permitirían mostrar tanto los caminos como las características espaciales del entorno, logrando una mejor reproducción mental de la ruta y una mejor comprensión de la disposición geográfica de la realidad.
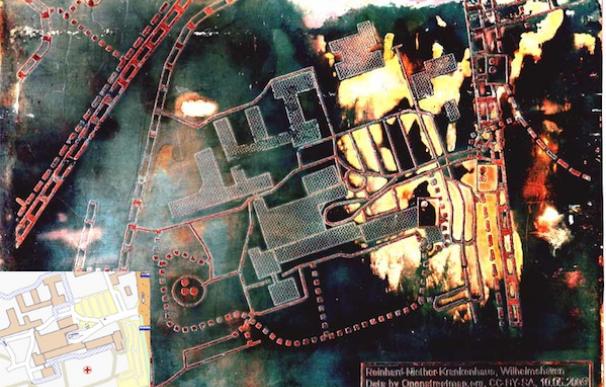
El primer mapa en relieve basado en datos de OSM fue publicado el 12 de mayo de 2009. Se trata de una lámina de cobre con el tamaño de una hoja de papel DIN A4 que fue presentado en el SOTM 2009 de Amsterdam, durante la 3 ª Conferencia Internacional Anual de OpenStreetMap.
Los pocos mapas para ciegos existentes en las calles casi siempre han constituido más un centro de información para turistas que miran en vez de una guía especial para los carentes de vista.
Como ocurre en el caso de este mapa en relieve del centro de Florencia, la información suele restringirse a escribir en braille encima de cada edificio su nombre; no suelen ser mapas reales de las calles que permitan hacerse una copia mental exacta de la realidad. Por eso los mapas del proyecto HaptoRender tienen mayores ventajas en comparación con los mapas táctiles comerciales.
Por ejemplo, los mapas pueden ser creados por cualquiera que tenga una impresora 3D, no sólo por los ayuntamientos para mostrar centros de interés turísticos. También los mapas pueden ser generados a partir de datos geográficos actuales, no sólo a partir de ediciones de mapas obsoletos. Y por supuesto serían baratos, porque no habría ningún coste de licencia para coger los datos.
Por ejemplo, después del terremoto de Haití a principios de este año, se actualizaron los mapas de OpenStreetMap en un par de días, mostrando los edificios dañados, las carreteras bloqueadas, etc... Estos datos se convirtieron en una impagable ayuda para los receptores GPS, permitiendo a los trabajadores de ayuda navegar con mayor facilidad por el desastre.
Algo así podría ocurrir con los mapas en 3D para ciegos, pudiéndose imprimir para mostrar las frecuentes obras que impiden el paseo en las ciudades o los caminos con menos tráfico peatonal para llegar a un destino. La mayoría de los datos de OSM (OpenStreetMap) son obtenidos mediante un GPS de mano, mientras se anda por las calles.
El GPS está configurado para grabar todos los datos del camino, que luego son subidos a los servidores de OpenStreetMap. Estos datos en bruto, accesible a casi todos, permitirá a los desarrolladores de HaptoRender convertirlos en soluciones táctiles gracias a la impresión 3D, para que también lleguen a los que más los necesitan.
Más info en el wiki de HaptoRender
Hemos bloqueado los comentarios de este contenido. Sólo se mostrarán los mensajes moderados hasta ahora, pero no se podrán redactar nuevos comentarios.
Consulta los casos en los que lainformacion.com restringirá la posibilidad de dejar comentarios